- Check motor sequence (found in Mission Planner>Initial Config>Optional Hardware>Motor Test)
- Motor sequence of 1,2,3,4 is different from that of A,B,C,D in the sequence test
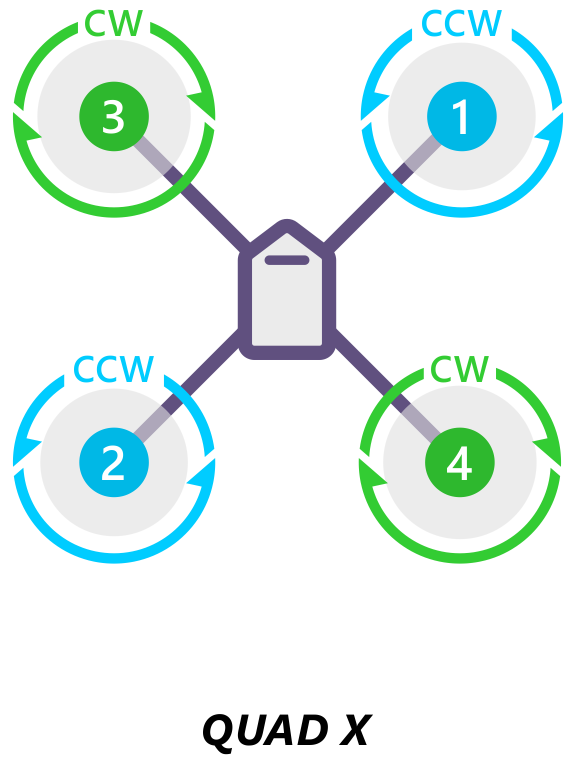
- The sequence A,B,C,D corresponds to motors 1,4,3,2 respectively.
- Check motor rotation is as depicted in http://ardupilot.org/copter/_images/motororder-quad-x-2d.png
- Pre Arms Checks Must be enabled if Flying in Auto Modes
- Set RTL(Return to Launch) Altitute as necessary default is 15m
- First Test should be in Stabilize ie: Full mannual control
- Land mode prevents disarm use RC to switch back to Stabilize
- If there is an issue with a motor or esc we can identify it by looking at the servo output PWM which will be stuck on a particular value
- If the motor rpm is quite high it can be changed by changing the parameters
MOT_SPIN_MIN,MOT_SPIN_MAXandMOT_SPIN_ARM
{kind=link}
- Flipping due to wrong motor sequence
- Unexpected behaviour as Pre Arm Checks where turned off
- RTL Altitude was set to default while testing in not so open area
- Land Mode without GPS lock == Bad Idea
- Unstable flight & crashes due to bad motor/esc
- Take Off needs RC to be connected and above zero throttle
- Drifting in GPS Aided mode will be due to poor gps or no gps
- tf seems like something we can use for following
- TODO: ROS on raspberry pi using ubuntu for arm servers
- First Flight test caused drifting and altitute errors due to bad GPS
- Second Flight test extremely stable flight and altitude obtained after GPS 3D Fix
- TODO: Communication between drones
It contains codes run using mavros
Contains codes run using dronekit